Planning
智能体会把大型任务分解为子任务,并规划执行任务的流程;智能体会对任务执行的过程进行思考和反思,从而决定是继续执行任务,或判断任务完结并终止运行。目前Agent大部分的planning逻辑,是通过提示词(Prompt),手动告诉 LLM 它该怎么思考、怎么分步执行的。实际系统里常常先通过人工/程序硬编码固定主干流程以及有严格要求的核心业务,再在需要模型能力的节点中(例如创新、总结、标注、推理等任务),通过 Prompt 来让模型做局部规划或执行,从而在灵活和可控之间找到平衡。
Prompt 更像"指导"或"原则",让模型在这些原则内自由思考、制定和执行流程,适合需要灵活应变、创造性或自动化程度高的场景。
人工/程序硬编码的流程,适合高度可控、可预测、合规、安全的任务;这些场景往往我们不希望模型自由发挥。
举个例子,比如在电商系统中,身份信息验证不能出错,售后政策有明确规定,这些都适合人工编码。而智能客服则可以通过prompt指导LLM来进行回复。
Prompt 与硬编码的适用场景
什么时候用 Prompt 让 LLM 来决定或规划
需要模型自行推理或发挥创造力时
问题不确定、场景复杂:例如,你需要一个解决方案,但并不清楚最佳方案是什么,需要模型自己做大量推断。
希望模型能灵活应对多变场景:场景可能临时发生变化,或者问题本身没有"标准化"的解决流程;这时借助 LLM 自主推理和生成方案更高效。
需要模型产生更多可能性:尤其在创意、撰写文案、构思初稿等需要发散思维的任务中,你希望模型做不同尝试、给出多种备选方案。
人力成本/维护成本高
- 不要人为写死过多逻辑:有时业务频繁变化,如果完全硬编码,会导致需要经常改程序。通过 Prompt 动态让模型来生成、优化策略或流程,可减少手动维护的成本。
辅助决策或自动化
- 你只需要告诉模型"目标"或"限制条件",让模型自己"分解"并"规划"下一步操作,而非固定给出所有步骤。
什么时候要用人为定义/硬编码
流程固定,可控性要求高
强流程化/标准化:如某些业务流程、法务流程、风控流程等,规定必须走固定的若干步骤、检查点。例如KYC(Know Your Customer,实名认证)等合规步骤,这种就适合在业务代码里"写死"或严格定义。
合规或安全要求高:不能容忍模型输出违反规定的内容;需要可解释、可审计。人工定义好的流程更可控,审计上也更简单。
不需要太多"模型推理"
简单稳定的逻辑:比如根据用户选择,进入下一个固定页面或固定问答,不需要模型判断或发挥创造力。手动硬编码更加直接、高效。
高准确度要求 + 可预期:有些核心业务关键性很高(例如金融交易的步骤),一旦出错会造成损失,这时往往宁可牺牲灵活度,也要保证流程的绝对稳定和可验证。
需要结合大量外部系统或特定算法
- 与数据库、API 或传统程序强绑定:如果中间步骤牵涉到很多传统逻辑(比如数据库查询、多层调用),而这些逻辑又必须严格按某个顺序走,这种更适合在编程逻辑里"定死"流程,而不是让模型自由调度。
将人为定义和LLM规划相结合
实际系统里常常"先在人为代码中固定主干流程",再在需要模型能力的节点中,通过 Prompt 来让模型做局部规划或执行,从而在灵活和可控之间找到平衡。
大框架"定死",关键节点用 Prompt:先用人工代码或流程图固定好业务主流程,在需要创造力或不确定性强的地方,让模型根据 Prompt 来规划或填充内容。
在 Prompt 中嵌入关键信息和限制条件:比如你可以在 Prompt 里告诉模型"这里要先检查一下输入是否合法,否则直接返回失败",再让模型自己决定在什么条件下执行具体动作。
LLM 生成"初步规划",再由人工/代码做校验或修订:例如让模型生成一个方案,然后可以通过代码或人工来审核它,如果不符合要求,再让模型重新迭代或直接由人来修正最终执行流程。
一些关键考量点
是否允许模型发挥主观创造力或灵活应对
如果需要,倾向于多用 Prompt,让 LLM 自行规划。
如果不行(必须"100% 按照规定"),就多在程序里硬编码。
可控性 / 风险承受度
重要环节、合规要求极高场景 → 人工+程序严格定义
容错度高或创新、探索场景 → 让模型自由生成
维护成本
需求变化频繁,需要经常改 → 用 Prompt 可能更灵活
需求相对稳定 → 硬编码也没问题
可解释性 / 审计要求
模型生成的内容难以完全审计或解释 → 重要核心部分需人工定义
非关键部分,可以让 LLM 去生成
总结
固定 & 硬编码:
常见于需要高可控性、固定逻辑或合规要求的部分,或对数据处理、权限管理、业务规则等有严格要求的场景。
其优势是:结果可预期、容易审计、维护简单。
劣势是:缺乏灵活性,不易处理未知变化或新需求。
Prompt & LLM:
适合对自然语言处理、创造性或不确定性较高的任务,或需要做推理/归纳/总结时。
优势是:可以减少人工或传统编程的复杂度,快速给出多种方案或文案,能适应变化的场景。
劣势是:输出可能有不确定性,需要一定的验证或控制策略。
基础方法
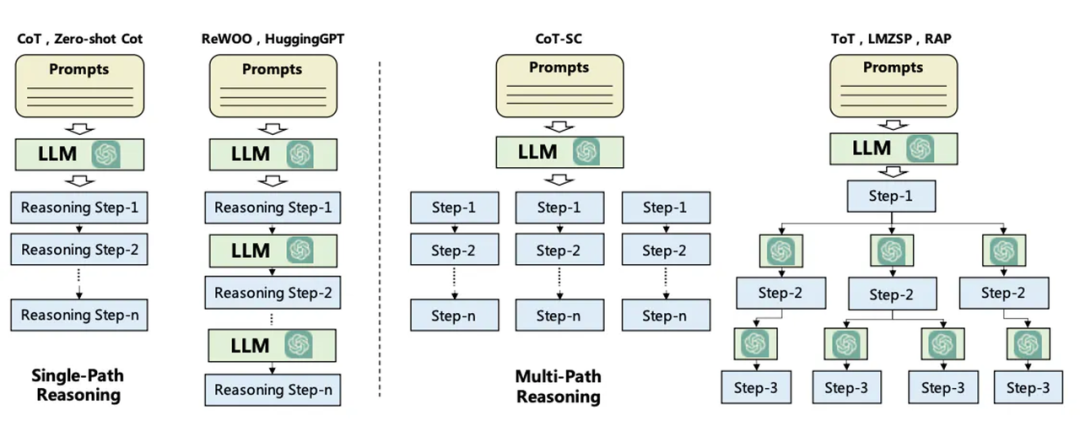
CoT(Chain of Thought,思维链)
思维链将复杂的问题分解为更简单的任务,逐步解决问题,使用CoT能在算数、常识和推理任务都提高了性能。但这会增加推理的时间。CoT可以分为Few-Shot 和Zero-Shot(Zero-Shot 只需要在prompt中加入"让我们一步步的思考")两种。使用Langchain可以轻松的实现CoT:
# 创建聊天模型
from langchain.chat_models import ChatOpenAI
llm = ChatOpenAI(temperature=0)
# 设定 AI 的角色和目标
role_template = "你是一个xx工作的AI助手,目标是xx"
# CoT 的关键部分,AI 解释推理过程,并加入一些先前的对话示例(Few-Shot Learning)
cot_template = """
请你按部就班的思考,先理解用户需求,再进行信息检索,再做出决策
一些示例:xx
"""
from langchain.prompts import ChatPromptTemplate, HumanMessagePromptTemplate, SystemMessagePromptTemplate
system_prompt_role = SystemMessagePromptTemplate.from_template(role_template)
system_prompt_cot = SystemMessagePromptTemplate.from_template(cot_template)
# 用户的询问
human_template = "{human_input}"
human_prompt = HumanMessagePromptTemplate.from_template(human_template)
# 将以上所有信息结合为一个聊天提示
chat_prompt = ChatPromptTemplate.from_messages([system_prompt_role, system_prompt_cot, human_prompt])
prompt = chat_prompt.format_prompt(human_input="xx").to_messages()
# 接收用户的询问,返回回答结果
response = llm(prompt)
print(response)ToT(Tree of Thoughts,思维树)
在需要多步骤推理的任务中,引导语言模型搜索一棵由连贯的语言序列(解决问题的中间步骤)组成的思维树,而不是简单地生成一个答案。ToT框架的核心思想是:让模型生成和评估其思维的能力,并将其与搜索算法(如广度优先搜索和深度优先搜索)结合起来,进行系统性地探索和验证。对于每个任务,将其分解为多个步骤,为每个步骤提出多个方案,在多条思维路径中搜寻最优的方案。
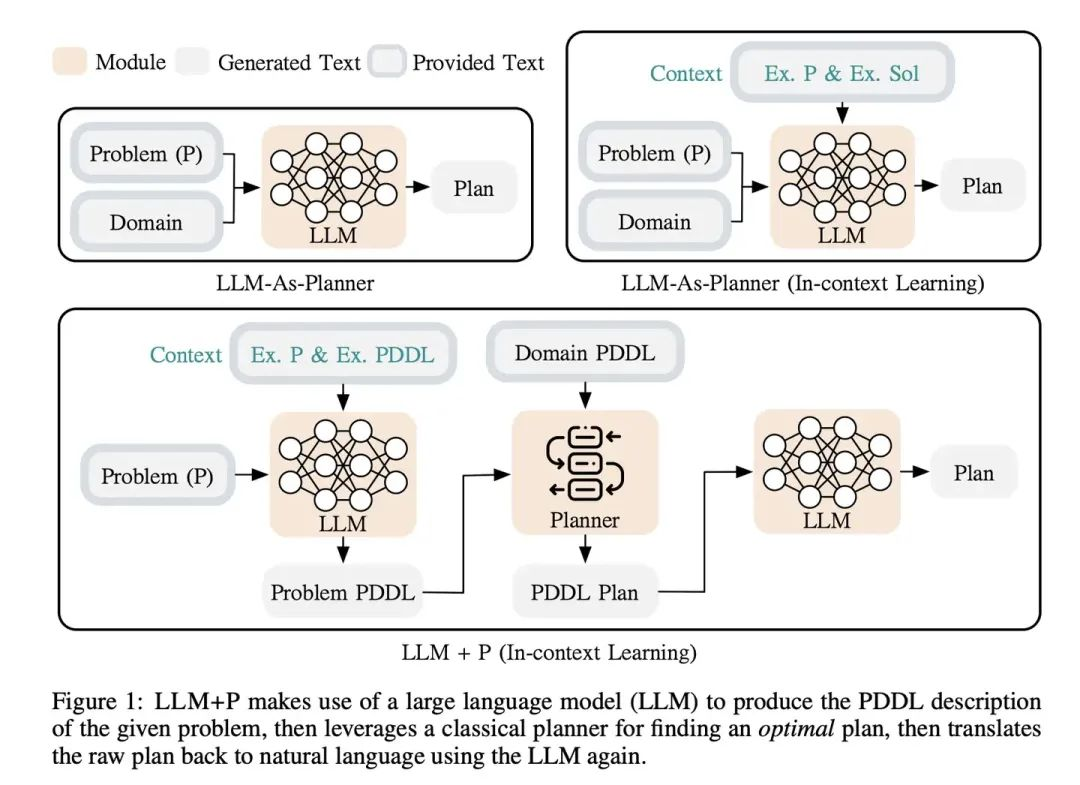
LLM+P
大型语言模型不擅长解决长期规划问题。相反,一旦以一种规范的方式给出问题,传统的规划方法就能够运用有效的搜索算法快速找到正确的,甚至是最优的解决方案。LLM+P把这两者的优势结合起来,接收一个用自然语言描述的规划问题,将语言描述转化为一个用规划领域定义语言(PDDL,Planning Domain Definition Language)编写的文件,然后利用传统规划方法快速找到解决方案,最后将找到的解决方案翻译回自然语言。
PDDL包含领域定义和问题定义两部分:
领域定义:描述可能的动作、动作前提条件、和导致结果。
问题定义:描述一个具体的规划问题,包含初始状态和目标状态
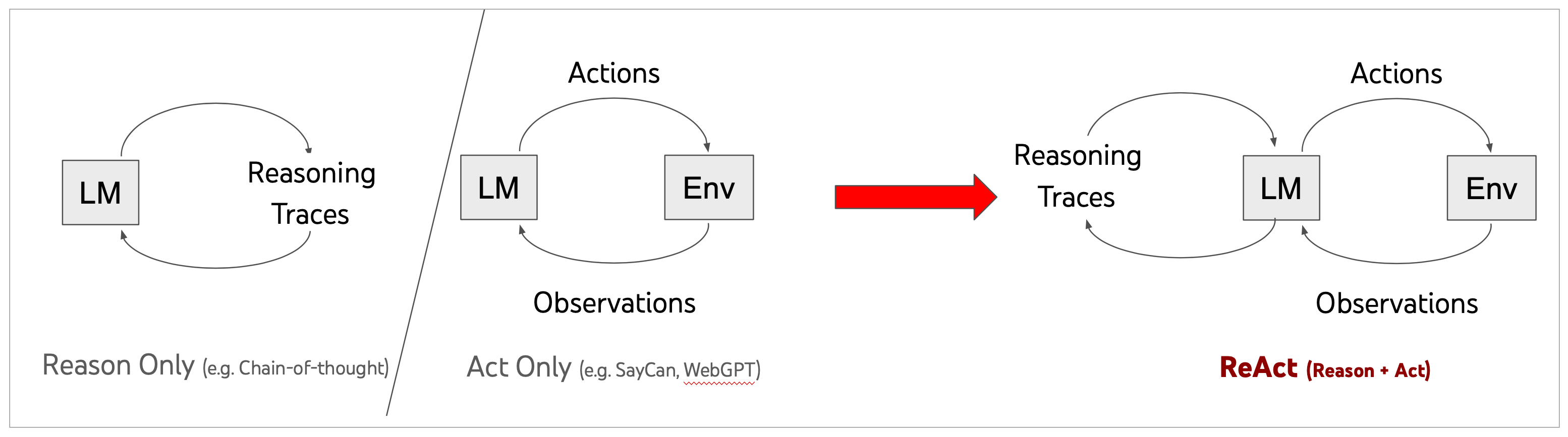
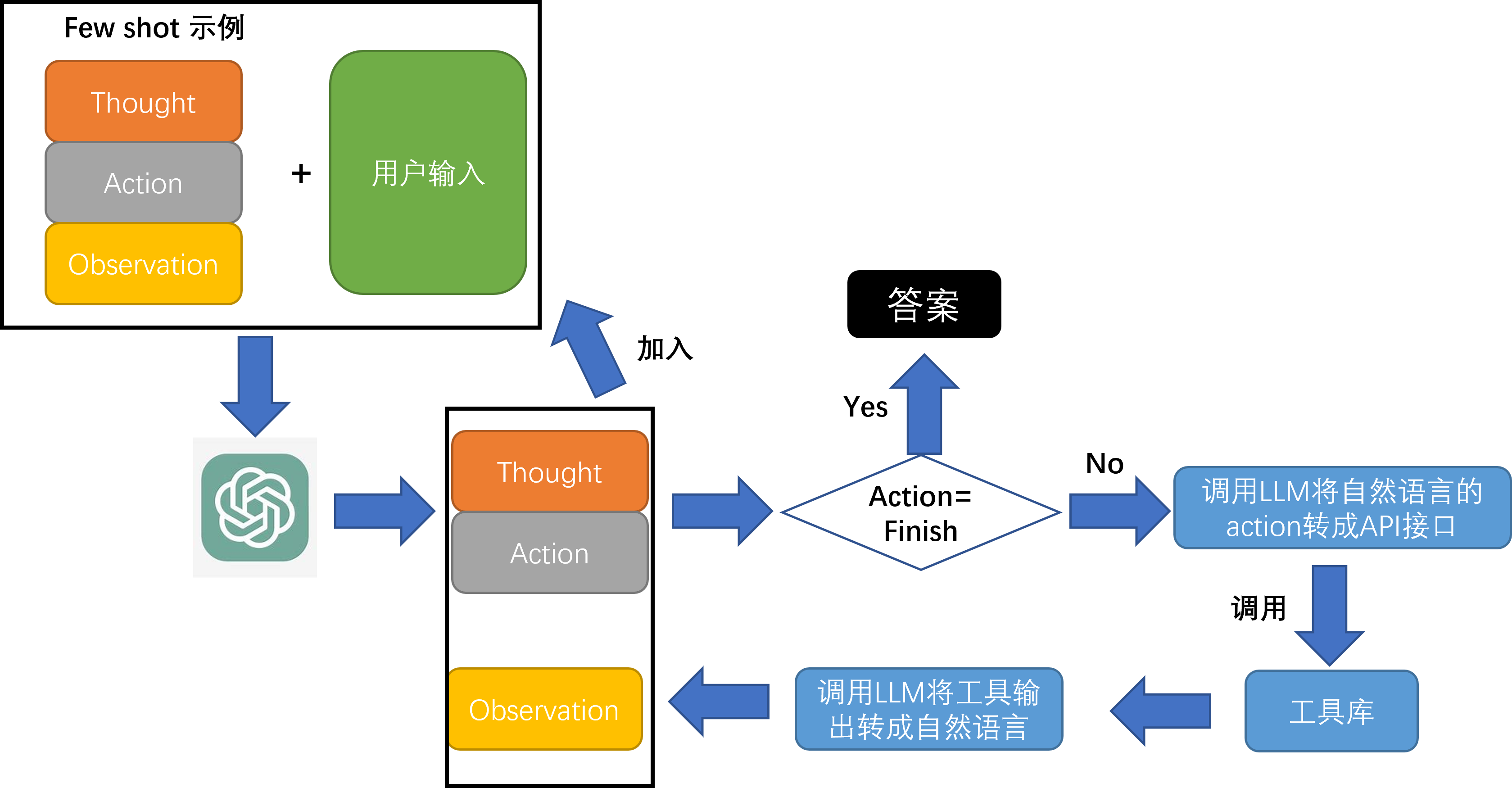
ReAct(Reasoning + Acting)
ReAct: Synergizing Reasoning and Acting in Language Models(不是前端哪个react框架)。其实现了"行动"和"推理"之间的协同作用,使得大模型能够作为智能代理,生成推理痕迹和任务特定行动来实现更大的协同作用。
ReAct的任务解决轨迹是Thought-Action-Observation,可以简化为模型按照Reasoning-Acting框架。Reasoning包括了对当前环境和状态的观察,并生成推理轨迹。这使模型能够诱导、跟踪和更新操作计划,甚至处理异常情况。ReAct的每一个推理过程都会被详细记录在案,这也改善大模型解决问题时的可解释性和可信度;Acting在于指导大模型采取下一步的行动,比如与外部源(如知识库或环境)进行交互并且收集信息,或者给出最终答案。
对比只使用CoT,会导致模型存在幻觉,没有与外部工具交互的功能。而将ReAct框架与CoT结合,就能够让大模型在推理过程同时使用内部知识和获取到的外部信息,提升模型的可解释性和可信度。
langchain实现了ReAct框架:
llm = ChatOpenAI(model=os.environ["LLM_MODELEND"], temperature=0)
tools = load_tools(["serpapi", "llm-math"], llm=llm)
agent = initialize_agent(
tools, llm, agent=AgentType.ZERO_SHOT_REACT_DESCRIPTION, verbose=True)
agent.run(prompt)React+CoT的训练流程如下,注意之前每轮的输出会加入prompt作为后续轮次模型的输入。
规划算法
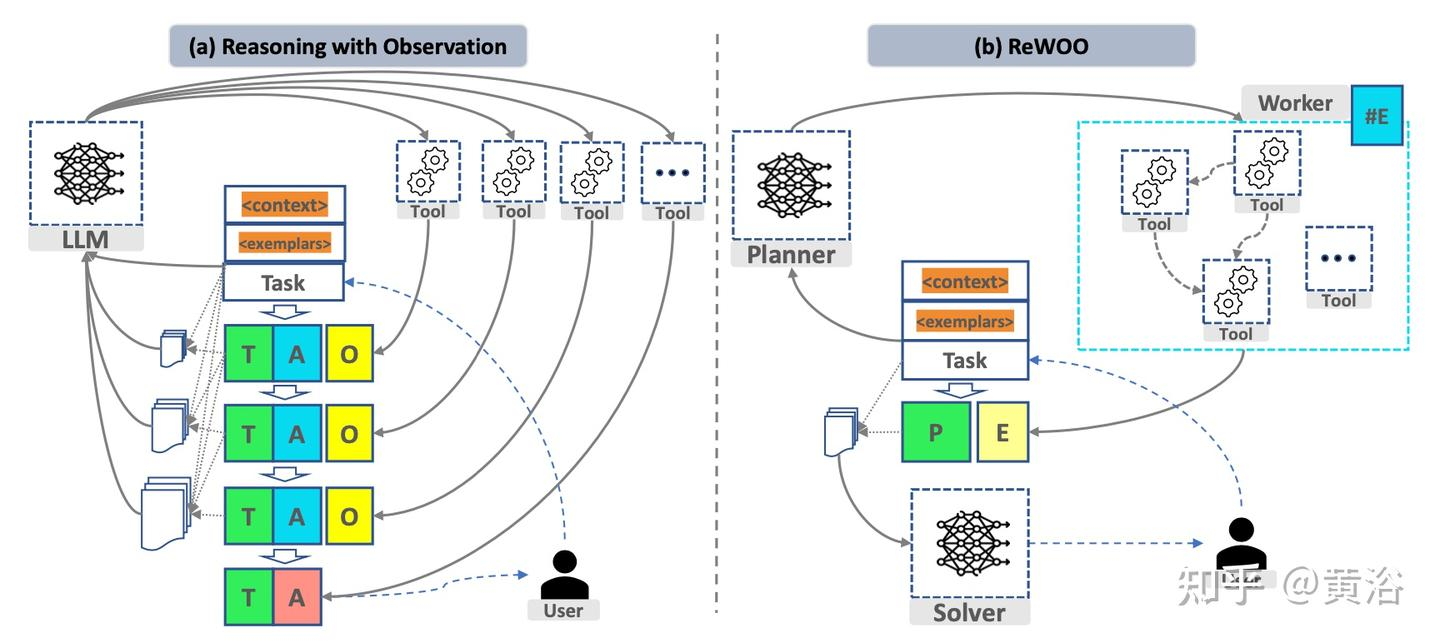
ReWoo
ReAct 提示词结构是 Thought→ Action→ Observation, React每一轮思考都要将之前所有的响应加入prompt,会消耗大量的token。ReWoo将推理过程与外部观察分离,将 Observation 隐式地嵌入到下一步的执行单元中了,即由下一步骤的执行器自动去 observe 上一步执行器的输出,从而显著减少了token消耗。
ReWoo包含三个部分:
Planner:负责将用户问题分解为子任务并确定执行顺序,每个子任务都分配给Worker;
Worker:利用工具检索外部知识提供证据;
Solver:负责综合所有任务和证据,生成最终答案。
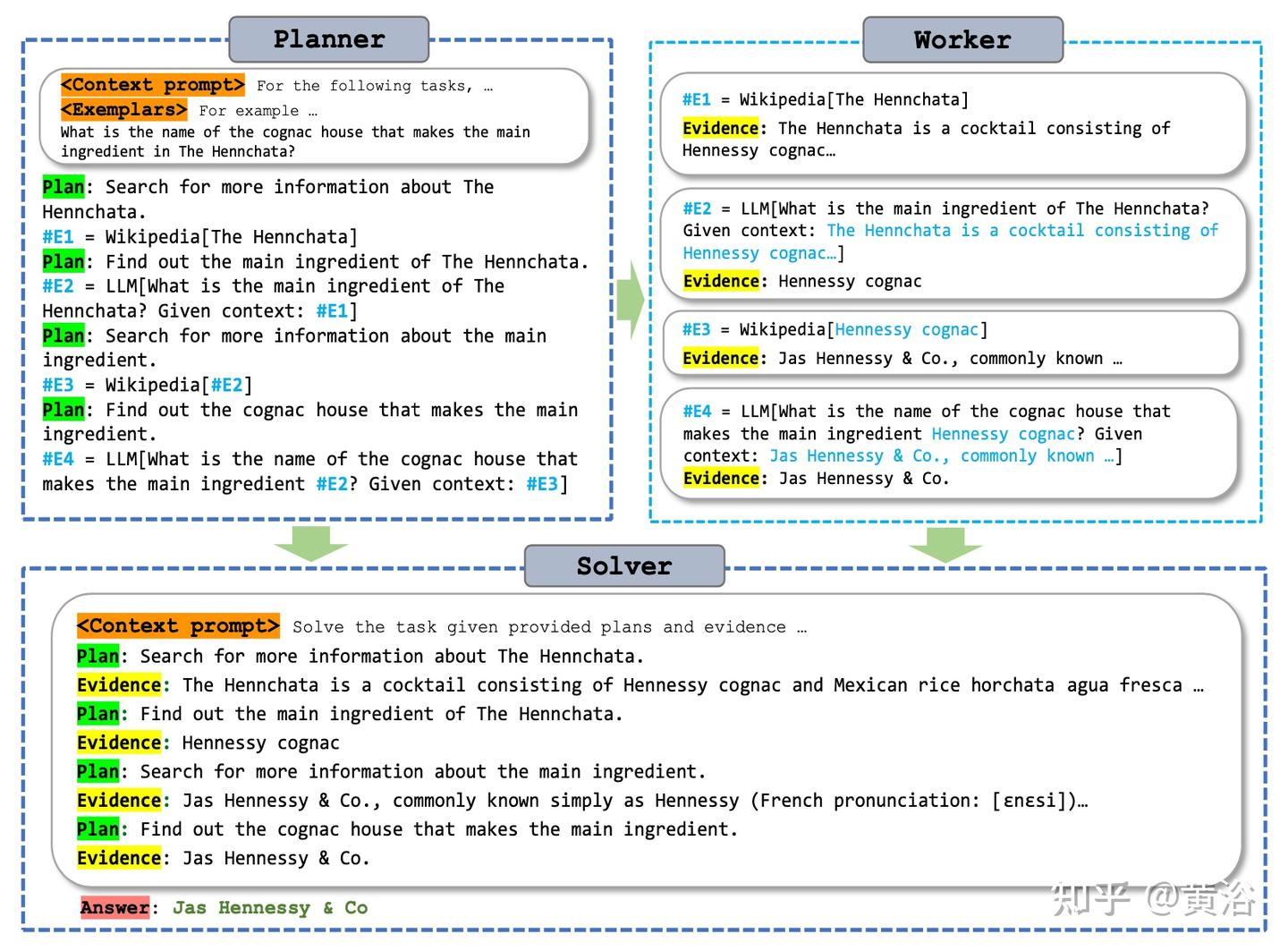
如下图所示,React每一轮的都要将上下文、示例和之前轮次的相应输入到LLM中,带来大量的冗余,并且可能需要调用LLM很多次;ReWoo中Planner负责生成一个子任务列表,并调用Worker从工具中获取证据,根据列表循环执行完成任务,避免了将prompt中一样的内容反复交给LLM,这个过程最少只调用了两次LLM(Planner和Solver各一次)。ReWoo的另一个优点是简化微调过程,由于Planner不依赖于工具的输出,因此可以在不实际调用工具的情况下对Planner进行微调。
Plan and Solve
这个方法在零样本思维链的基础上进行优化。Zero-shot-CoT知识简单的在prompt中加入"让我们逐步思考",面临着计算错误、缺失步骤错误和语义误解错误等三个问题。Plan and solve解决了缺失步骤错误,先制定计划将任务分解为子任务,再按照计划执行子任务。
这个方法整体感觉偏向提示工程。prompt应该满足以下条件:
引导LLMs确定子任务并完成这些子任务,
指导LLMs更加关注计算和中间结果,并尽可能确保它们的正确执行。
最终的prompt格式为:"Q: [X]. A: Let's first understand the problem,extract relevant variables and their corresponding numerals, and devise a plan.Then let's carryout the plan, calculate intermediate results(pay attention to calculation and common sense), solve the problem step by step, and show the answer."
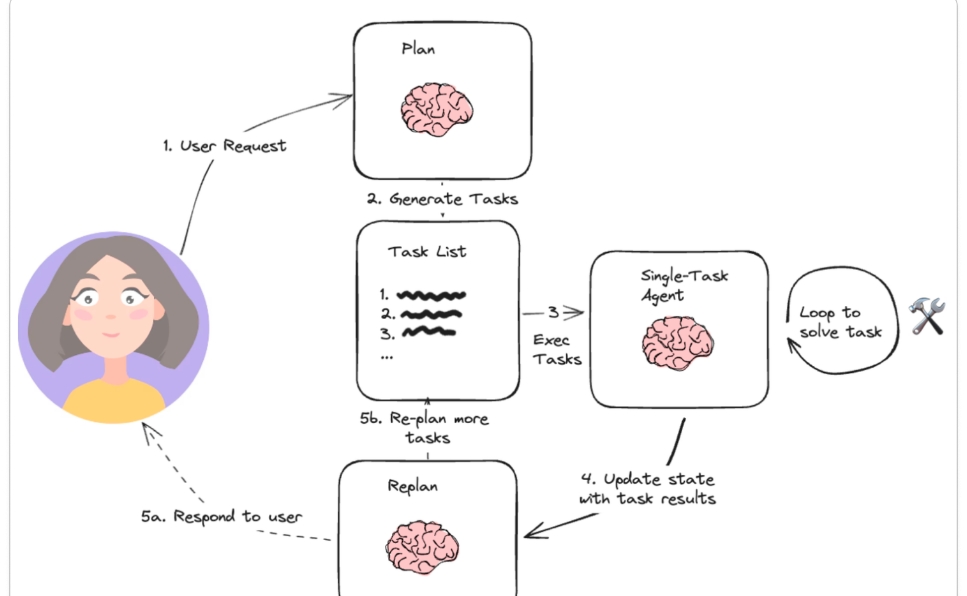
Plan-and-solve的思想的一大应用就是Plan-and-Execute。Plan-and-Execute相比ReWOO,最大的不同就是加入了Replan机制,整体的思考流程如下图。Planner负责生成任务列表,replanner负责当完成一个子任务时进行重新思考,并将原有计划和已经完成的步骤加入prompt中,更新任务列表。
LLMCompiler
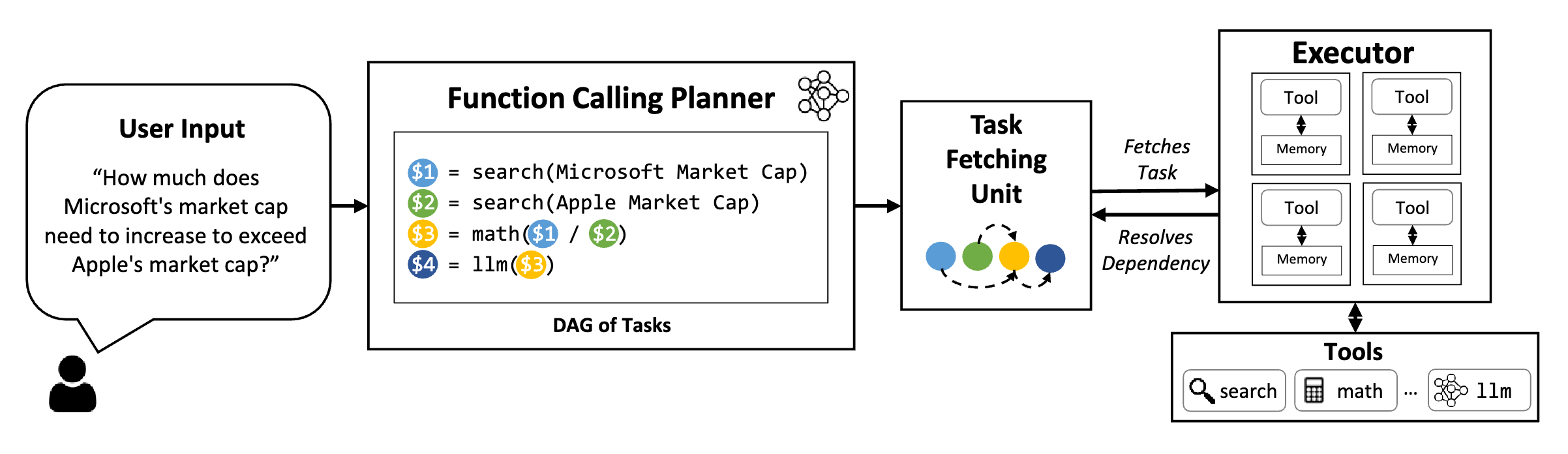
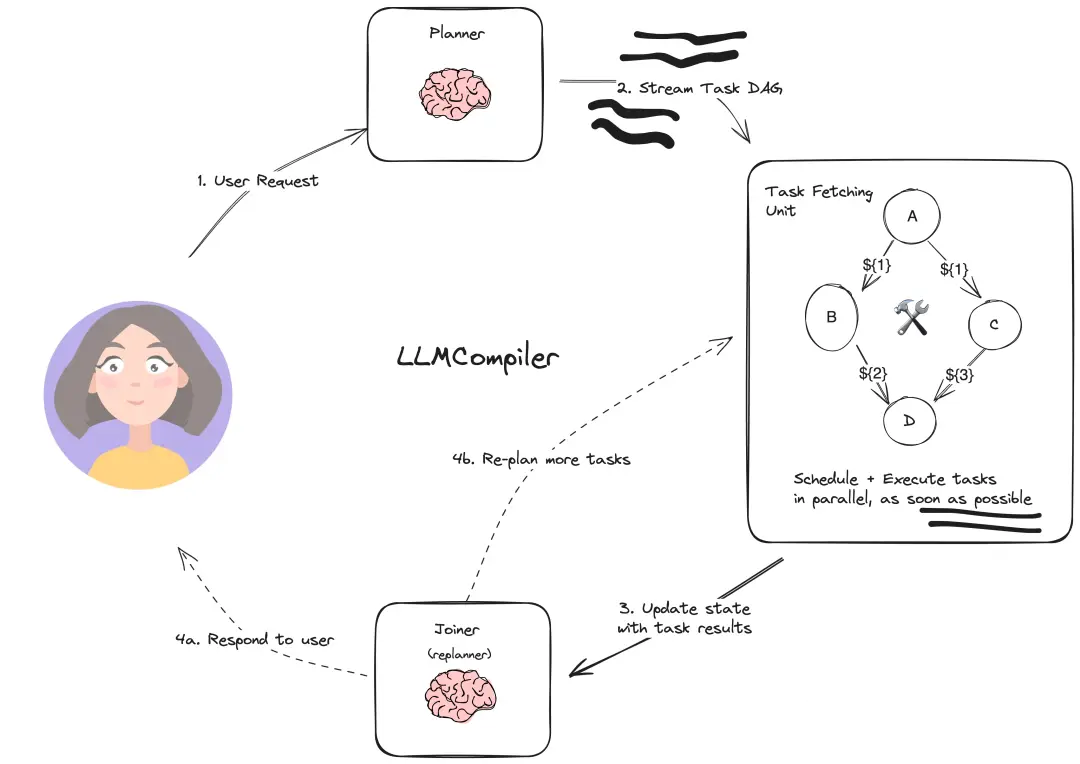
这个方法的主要思想是通过并行function call来提高效率,比如询问微软的市值需要增长多少才能超过苹果的市值,可以并行的查询微软市值和苹果市值。主要包含4个模块:
函数调用规划器:负责理解用户输入,拆分成可执行的子任务,并确定它们之间的依赖关系,形成任务依赖的有向无环图(DAG)。该部分需要用到大模型,最好用户为规划器提供一些上下文示例。
任务获取单元:根据贪婪策略,将可以执行的任务发给执行器,并用执行后的输出替换后续任务的占位符。无需LLM
执行器:多个执行器并发执行,可以调用用户提供的工具。
动态重规划:对于复杂的任务,可能需要根据中间结果进行重新规划,由函数调用规划器生成新的子任务和它们之间的依赖关系。
函数调用规划器负责生成一个包含任务及其相互依赖关系的 DAG(Directed Acyclic Graph,有向无环图)。然后,任务获取单元根据任务的依赖关系将这些任务并行调度到执行器。在本例中,任务 $1 和 $2 被同时获取,以并行执行两个独立的搜索任务。每个任务执行完成后,结果将被转发给任务获取单元,用实际值替换其占位符变量,同时解除被依赖任务的阻塞(例如,任务 $3 中依赖 $1 和 $2)。所有任务执行完成后,最终答案将被传递给用户。
反思
Reflexion
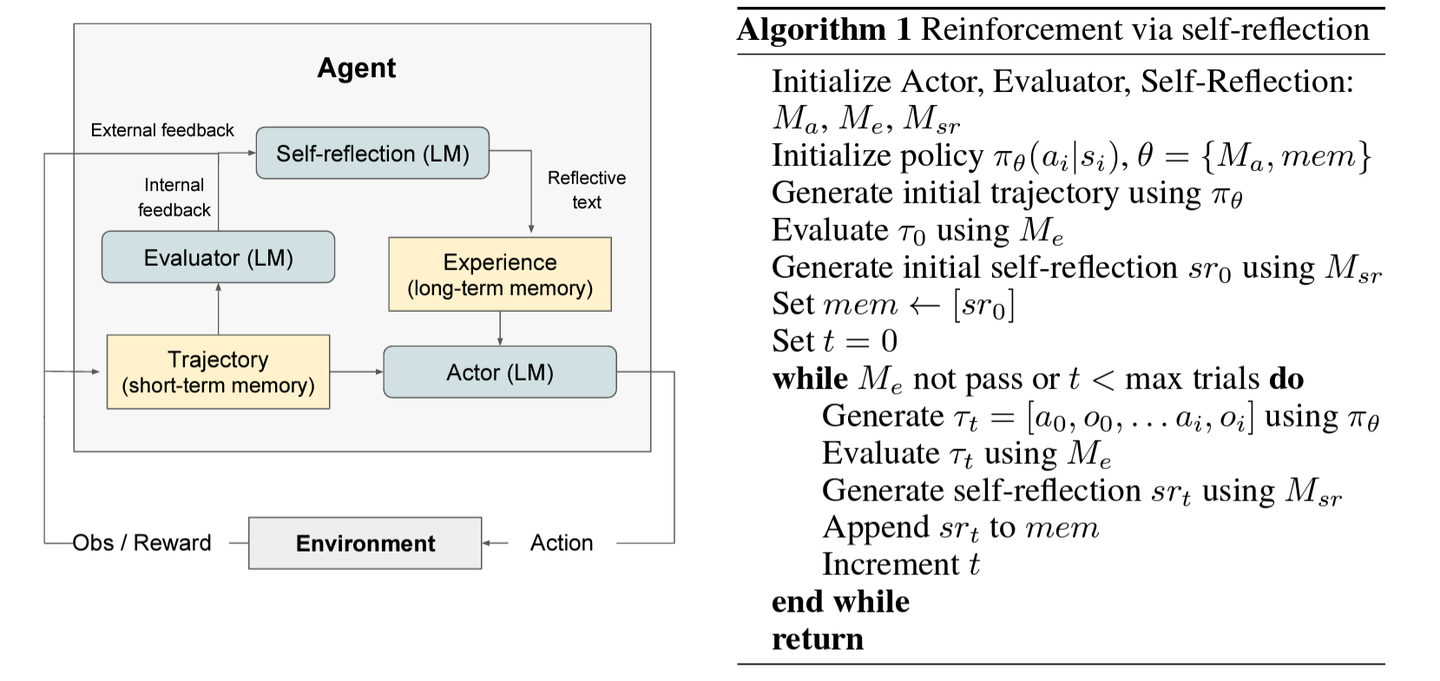
Reflexion采用了强化学习的思想,Reflexion代理在生成每一个轨迹后,进行启发式评估,生成反思文本并保留在记忆缓冲区中,以诱导在随后的尝试中做出更好的决策。首先介绍基本概念:
启发式函数:用于确定轨迹是否效率低下或包含幻觉应当停止。
效率低下:长时间未成功完成的轨迹。
幻觉:定义为一系列连续相同的行动,这些行动导致在环境中观察到相同的结果。
Reflexion包含三个不同的模型:
执行者(Actor)用
表示,它生成文本和动作。利用llm根据状态观察生成文本和动作,采用类似强化学习的设置,从策略采样行动,并从环境接受观察,生成轨迹,可以采用React框架。 评估者模型(Evaluator),由
表示,它对 产生的输出进行打分,评估行动的价值,将轨迹作为输入,计算奖励分数。 自我反思模型(Self-Reflection model),用
表示,它协助执行者自我提升。 通过生成自我反思来为未来的尝试提供有价值的反馈,存储到记忆中。Memory 存储短期记忆和长期记忆。在推理时,Actor根据短期和长期记忆做出决策,轨迹历史作为短期记忆,而Self-Reflection模型的输出则存储在长期记忆中。
在提示词方面,要求让大模型针对问题在回答前进行反思和批判性思考,反思包括有没有漏掉(missing)或者重复(Superfluous),然后回答问题,回答之后再有针对性的修改(Revise)
Self Discover
Self-discover 的核心是让大模型在更小粒度上 task 本身进行反思,比如前文中的 Plan&Slove 是反思 task 是不是需要补充,而 Self-discover 是对 task 本身进行反思。
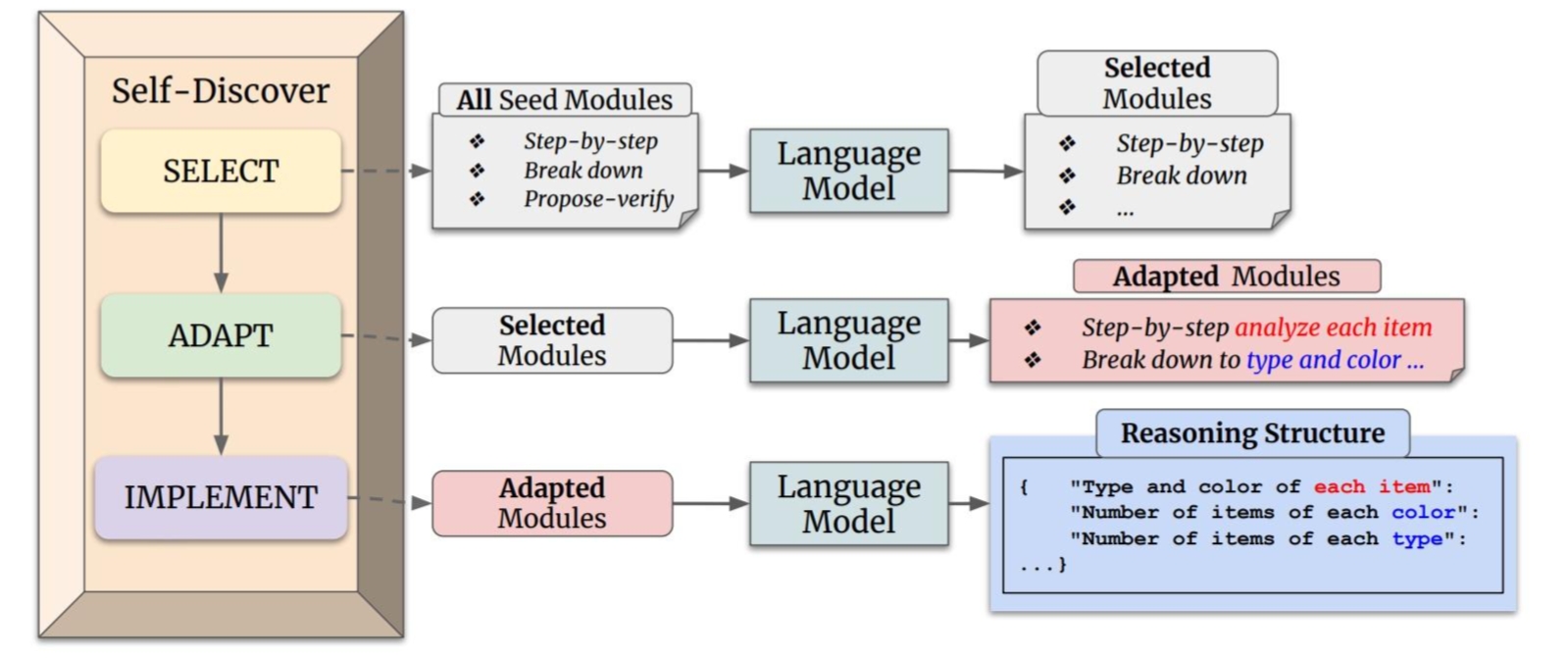
本方法主要分为两个阶段:利用SELF-DISCOVER 构建了任务特定的推理结构,应用推理结构解决问题。其中第一步又可以分为以下三个操作:
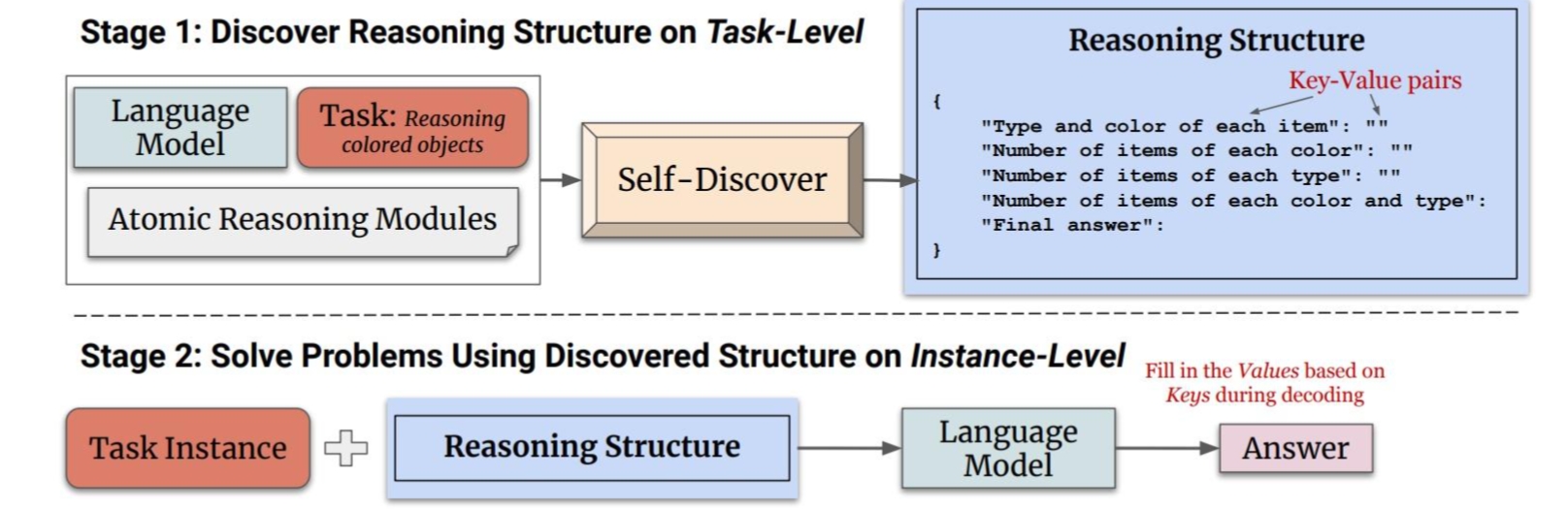
选择:模型从一组原子推理模块(例如"批判性思维"和"逐步思考")中选择对于解决特定任务有用的模块。模型通过一个元提示来引导选择过程,这个元提示结合了任务示例和原子模块描述。选择过程的目标是确定哪些推理模块对于解决任务是有助的。
适应:一旦选定了相关的推理模块,下一步是调整这些模块的描述使其更适合当前任务。这个过程将一般性的推理模块描述,转化为更具体的任务相关描述。例如对于算术问题,"分解问题"的模块可能被调整为"按顺序计算每个算术操作"。同样,这个过程使用元提示和模型来生成适应任务的推理模块描述。
实施:在适应了推理模块之后,Self-Discover框架将这些适应后的推理模块描述转化为一个结构化的可执行计划。这个计划以键值对的形式呈现,类似于JSON,以便于模型理解和执行。这个过程不仅包括元提示,还包括一个人类编写的推理结构示例,帮助模型更好地将自然语言转化为结构化的推理计划。
LATS(Language Agent Tree Search)
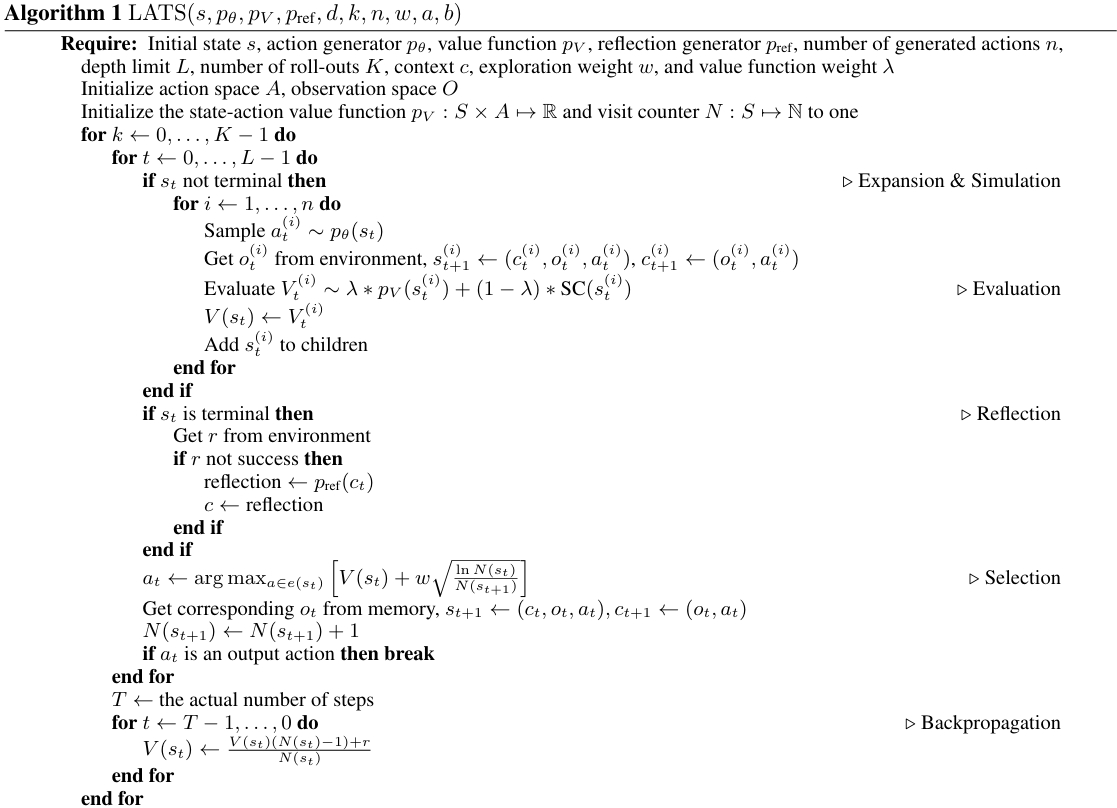
LATS算法《Language Agent Tree Search Unifies Reasoning Acting and Planning in Language Models》融合了ToT、React、Plan&solve、Reflection和强化学习等思想,作为对以上算法的总结。
预备知识
给定自然语言x和y,模型
React框架引入了外部环境的交互,定义行动空间
CoT、ToT和React框架面临着以下问题:1)CoT和React的自回归训练会忽略特定状态的潜在连续名词 2)CoT和ToT只依赖LLM自有的能力,可能造成幻觉。3)以上方法无法利用过去的经验。
蒙特卡洛树搜索(Monte Carlo Tree Search,MCTS)是一种决策树算法,树的结点表示状态,边表示行动。从初始状态根节点出发,每轮训练包含2个步骤:1)从当前状态p中探索多个子状态s,并采样n个动作。2)采取上置信度(UCT,Upper Confidence Bound for Trees)最高的动作,定义为:
V(s)表示节点s的期望value,N(s)表示访问节点s的次数,w是权重参数。当一个episode结束时,进行反向传播,用奖励r更新路径上的每个节点的value值:
LATS方法
本文提出的LATS遵循React框架的Thought-Action-Observation流程,参照蒙特卡洛树,每轮采样n个行动产生多个轨迹,以克服LLM的随机性并扩大探索域,从而找到最优轨迹。
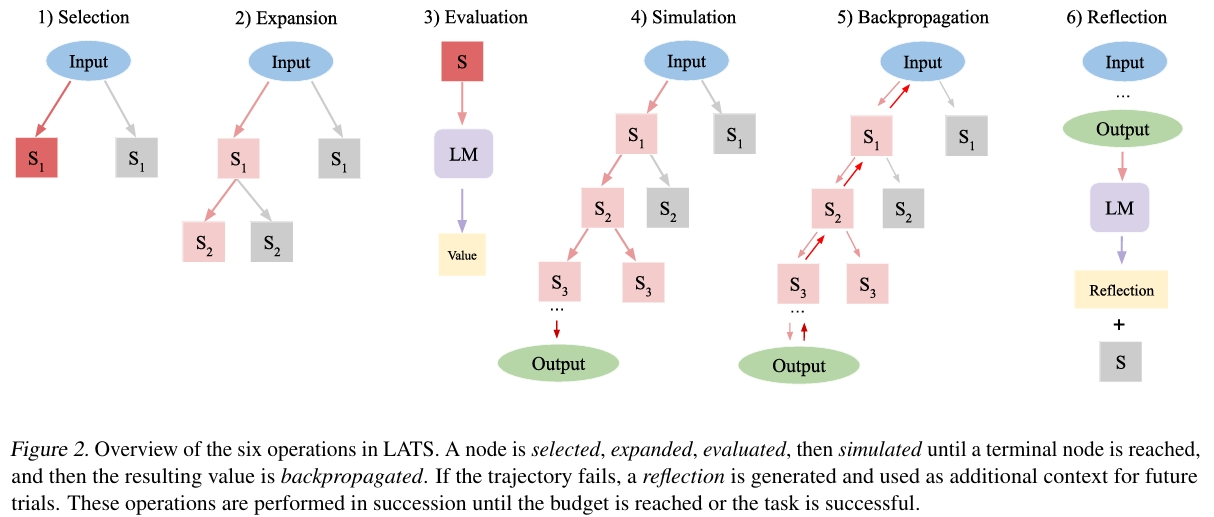
LATS包含以下图中的6个步骤,并循环迭代,直到采样了k个轨迹后任务完成或者计算资源限制。其中 $p_theta $ 同时作为agent,value function和反馈生成器,充分利用LLM的表征能力。
selection:根据蒙特卡洛树选择UCT值最大的下一个节点。
expansion:从当前状态p采样n个行动,与环境交互得到n个子节点。
evaluation:为每个子节点计算value值,参考ToT,通过提示工程将 $p_theta $ 作为一个评估值函数,并且这里还引入了环境反馈。还引入了基于self-consistency的启发,认为选择次数更多的action更精确:
simulation:重复之前的过程直到到达终点状态,如果达到最优解就直接结束,反之进行 Backpropagation和reflection。
backpropagation:更新蒙特卡洛树中轨迹上的每一个节点,
,其中r是奖励。 reflection:通过提示工程,让 $p_theta $ 根据轨迹和奖励进行self-relection,总结推理过程中的错误,并选择更好的选项。将错误的轨迹和relection存储在记忆中,在随后的迭代中,这些被加入到agent和value函数的上下文。
近期热门规划框架
BabyAGI
BabyAGI 使用一个"Task List"来管理所有待办任务。它有三个主要组件:
Task Creation Agent:根据当前任务、执行结果,不断新建子任务。
Task Prioritization Agent:对现有任务重新排序,决定执行顺序。
Execution Agent:真正去执行当前的任务(通常是调用LLM/工具等)。
循环流程
从 "Task List" 中取出最高优先级的任务。
调用 Execution Agent 去执行。
把执行结果(Result)交给 Task Creation Agent,是否需要生成新的子任务?
把更新后的任务列表给 Task Prioritization Agent,排序并循环。
AutoGPT
AutoGPT 也有一个任务/目标管理系统,也能生成子任务并执行。它侧重更丰富的"工具"支持,如联网、读取/写入文件、执行代码等,包含以下模块:
AI Config:存放 AI 的角色、名称、目标等基础信息。
Memory:把过去的重要信息存下来,供下一步参考。
Planner(或类似角色): 生成下一步要干啥。
Command Executor:解析 LLM 返回的命令,然后在外部执行相应操作。